日本開發可用於「軟體機器人」的人工皮膚
2021/01/11
東京工業大學準教授土方亙開發出了無需外部電源也能感知人或物的接觸的人工皮膚。這款人工皮膚採用樹脂材料,在保持柔軟性的同時,成功提高了感知的靈敏度。有望作為採用柔軟材料等、覆蓋「軟體機器人」表面的材料等加以利用。力爭2年後推向實用化。
 |
| 新開發的人工皮膚無需外部電源也能感知人或物的接觸 |
在日本的養老和護理一線,勞動力的減少正成為問題。在此背景下,代替人類從事工作的機器人的開發正在推進。由於設想在確保安全性的同時與人類合作,因此機器人的表面有必要採用柔軟且能感知接觸、起感測器作用的人工皮膚。
關於以往用於感知接觸的人工皮膚,有的利用了將外力變為電流的壓電元件以及電極間靜電容量的變化。壓電元件採用陶瓷材料,在柔軟性等方面存在課題。此外,靜電容量型在感知接觸時需要外部電源,成為薄膜化等的障礙。
此次開發的人工皮膚利用了用氟樹脂製造的「駐極體(Electret)」。駐極體看上去呈橡膠狀,對這種材料施加高電壓,可在約200攝氏度時形成膜。能在內部保持電荷,半永久地産生電場。
土方準教授等人製作了在電極材料之間按層堆疊駐極體和矽的結構。將負電荷存在駐極體裏,正電荷被誘導至電極。只要給表面電極加壓,矽就會變形,電極和駐極體間的距離發生改變,電極的正電荷移動,産生電流。通過接觸被加壓後,産生電流,從而獲得感知。
新開發的人工皮膚為厚度約50微米(1微米相當於千分之一毫米)、長寬各10釐米的正方形型。土方準教授等人為了做到不僅能感知接觸、還能感知接觸的位置,設計了利用四個角測定電壓的方式。根據加壓的位置,各位置的電壓産生差異,可根據其比率鎖定接觸部位。
 |
| 新型人工皮膚有望用於在狹小空間運作的感測器的電源 |
在確認發電原理的試驗中,確認具有壓電元件的約560倍的發電量。即使是輕輕觸碰,也能以高靈敏度感知。
今後將著眼於防止反覆接觸和彎曲導致的老化等,進一步提高可靠性。
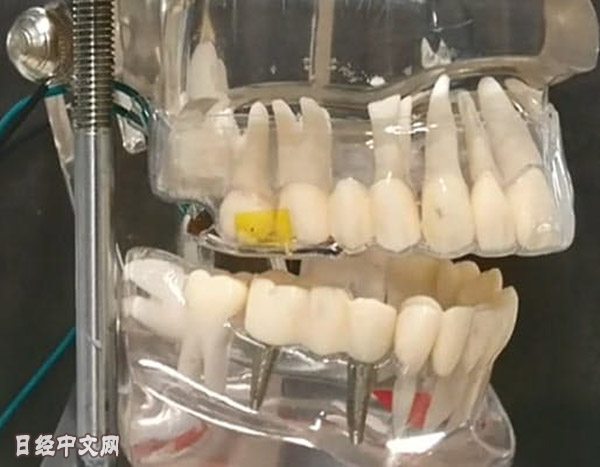
開發的人工皮膚有望用於在狹小空間運作的感測器的電源。例如在護齒(Mouthguard)中放入感測器、通過唾液測定血糖值的裝置的開發正在推進。該裝置此前以電池驅動,但在口中難以使用。預計可實現將開發的人工皮膚貼在牙齒上、利用咬合動作向感測器傳輸電流等的使用方法。
日本經濟新聞(中文版:日經中文網)鈴木遊哉
版權聲明:日本經濟新聞社版權所有,未經授權不得轉載或部分複製,違者必究。
報道評論
- 日經中文網公眾平臺上線!






HotNews
金融市場
| 日經225指數 | 56363.94 | 2110.26 | 02/09 | close |
| 日經亞洲300i | 2685.39 | 52.87 | 02/09 | close |
| 美元/日元 | 155.94 | -0.94 | 02/10 | 03:53 |
| 美元/人民元 | 6.9215 | -0.0165 | 02/09 | 18:52 |
| 道瓊斯指數 | 50146.84 | 31.17 | 02/09 | 13:47 |
| 富時100 | 10386.230 | 16.480 | 02/09 | 16:35 |
| 上海綜合 | 4123.0897 | 57.5063 | 02/09 | close |
| 恒生指數 | 27027.16 | 467.21 | 02/09 | close |
| 紐約黃金 | 4951.2 | 89.8 | 02/06 | close |