日本開發讓工業機器人「不教自會」的技術
2016/10/24
日本東京大學教授石川正俊等開發出了即使不提前教會作業步驟,也能使工業機器人順利完成零件組裝和擰螺絲等動作的技術。該技術可以使工業機器人每千分之一秒確認一次位置,並調整動作。有了這項技術,調整生産線的作業步驟等將可以輕鬆完成。石川教授等正與多家企業共同推進研究,力爭最快在1年後將這項技術推向實際應用。
一般情況下,要想讓工業機器人記住作業步驟,需要作業人員預先直接移動機器人的前端,或者利用控制器進行操作。在大量使用機器人的工廠,如果組裝産品的規格等發生變化,需要停下整個生産線重新教給機器人工序等,費時費力。
由於生産線使用的工業機器人的動作速度很快,普通圖像處理技術的速度難以跟上。新技術通過每秒可拍攝1000幀的攝像頭的圖像,確認零件的孔洞等目標位置。並通過高速計算如何移動機器人更好,進而調整移動方式和施力方式等。
在石川教授等進行的試驗中,機器人準確反覆完成了在開有直徑2毫米大小孔洞的板上插拔像鐵絲一樣的棒狀物的動作。
目前的工業機器人在長時間重覆相同作業的工序中能發揮效果,但不適合短期內頻繁變更作業內容。石川教授表示,「(利用新技術的話)如果是複雜的作業,可以省去大約一週的教學時間」。
版權聲明:日本經濟新聞社版權所有,未經授權不得轉載或部分複製,違者必究。
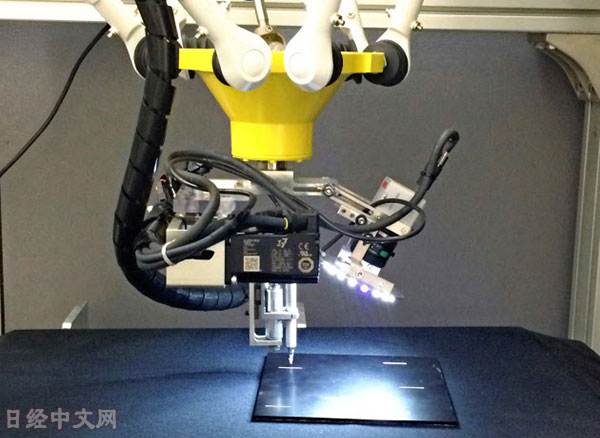 |
| 通過對高速錄影機拍攝的畫面進行快速分析,決定工業機器人的動作。 |
一般情況下,要想讓工業機器人記住作業步驟,需要作業人員預先直接移動機器人的前端,或者利用控制器進行操作。在大量使用機器人的工廠,如果組裝産品的規格等發生變化,需要停下整個生産線重新教給機器人工序等,費時費力。
由於生産線使用的工業機器人的動作速度很快,普通圖像處理技術的速度難以跟上。新技術通過每秒可拍攝1000幀的攝像頭的圖像,確認零件的孔洞等目標位置。並通過高速計算如何移動機器人更好,進而調整移動方式和施力方式等。
在石川教授等進行的試驗中,機器人準確反覆完成了在開有直徑2毫米大小孔洞的板上插拔像鐵絲一樣的棒狀物的動作。
目前的工業機器人在長時間重覆相同作業的工序中能發揮效果,但不適合短期內頻繁變更作業內容。石川教授表示,「(利用新技術的話)如果是複雜的作業,可以省去大約一週的教學時間」。
版權聲明:日本經濟新聞社版權所有,未經授權不得轉載或部分複製,違者必究。
報道評論
- 日經中文網公眾平臺上線!
請掃描二維碼,馬上關注!






HotNews
金融市場
| 日經225指數 | 54253.68 | 435.64 | 02/06 | close |
| 日經亞洲300i | 2632.52 | -18.84 | 02/06 | close |
| 美元/日元 | 157.12 | 0.01 | 02/07 | 05:50 |
| 美元/人民元 | 6.9380 | 0.0009 | 02/06 | 11:20 |
| 道瓊斯指數 | 50115.67 | 1206.95 | 02/06 | close |
| 富時100 | 10369.750 | 60.530 | 02/06 | close |
| 上海綜合 | 4065.5834 | -10.3333 | 02/06 | close |
| 恒生指數 | 26559.95 | -325.29 | 02/06 | close |
| 紐約黃金 | 4951.2 | 89.8 | 02/06 | close |