自動駕駛技術研發向周邊延伸
2014/08/04
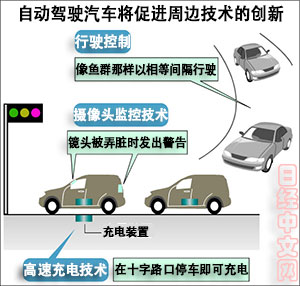
由電腦操控方向盤的自動駕駛汽車的開發已經延伸至周邊技術。繼自動控制煞車和油門的人工智慧以及對四週進行監控的攝像頭等核心技術之後,相關研究已經擴大至關係到普及的零碎技術。自動駕駛汽車由於被認為是不同於以往的交通工具,而圍繞其展開的研發也正在促進廣泛領域的技術革新。
日立製作所已經開發出讓自動駕駛汽車搭載的攝像頭保持良好視野的技術。如果發生鏡頭被弄髒或者因留有水滴而模糊不清,可能導致自動駕駛汽車識別車道等的準確度大幅下降。日立製作所開發的技術可以在這種情況下發出警告。該技術力爭在2018年前後投入實用。
自動駕駛汽車依靠相當於人類視覺的攝像頭識別行車線和障礙物。如果視野變窄,將難以識別車道等,人工智慧也可能因此難以做出正確判斷。日立開發的正是監控「這個眼睛是否可靠」的技術。
通過實際駕駛汽車,收集了用於判斷鏡頭是否被弄髒等情況的龐大數量的圖像。在試驗中,根據後視攝像頭拍攝的圖像,無論是在不同的天氣情況或晝夜,只要攝像頭的識別精度低於90%,相關裝置就發出了警報。
此外,愛信精機旗下子公司、技術支援公司Technova開發出了無需電纜即可迅速給純電動汽車等充電的技術。將利用埋在道路下的線圈給行駛中的汽車提供電力的非接觸式充電技術。純電動車等可在十字路口等待紅燈或在行駛期間實現逐步充電。該公司計劃配合2020年東京奧運會推進驗證性實驗。
該技術將在車體的整流器內嵌入降低電壓、增加電流的電路。利用地面的線圈能用以往2倍的電壓提供電力。例如在停車場等處停車期間,純電動車的話,3~4小時即可完成充電,只需用電纜充電的約一半時間。
日産汽車著眼於未來街頭隨處都有自動駕駛汽車行駛的情況,正將魚群在水中的游動方式作為研究的對象。設想利用車體的感測器等掌握與其他汽車或障礙物的距離,以在多輛汽車同時行駛時保持一定距離。這項研究有望在解決交通擁堵和防止追尾事故等方面發揮作用。
日産已經提出了力爭在2020年之前面向市場發售自動駕駛汽車的目標,相關研發正在加緊進行。
版權聲明:日本經濟新聞社版權所有,未經授權不得轉載或部分複製,違者必究。
 |
自動駕駛汽車依靠相當於人類視覺的攝像頭識別行車線和障礙物。如果視野變窄,將難以識別車道等,人工智慧也可能因此難以做出正確判斷。日立開發的正是監控「這個眼睛是否可靠」的技術。
通過實際駕駛汽車,收集了用於判斷鏡頭是否被弄髒等情況的龐大數量的圖像。在試驗中,根據後視攝像頭拍攝的圖像,無論是在不同的天氣情況或晝夜,只要攝像頭的識別精度低於90%,相關裝置就發出了警報。
此外,愛信精機旗下子公司、技術支援公司Technova開發出了無需電纜即可迅速給純電動汽車等充電的技術。將利用埋在道路下的線圈給行駛中的汽車提供電力的非接觸式充電技術。純電動車等可在十字路口等待紅燈或在行駛期間實現逐步充電。該公司計劃配合2020年東京奧運會推進驗證性實驗。
該技術將在車體的整流器內嵌入降低電壓、增加電流的電路。利用地面的線圈能用以往2倍的電壓提供電力。例如在停車場等處停車期間,純電動車的話,3~4小時即可完成充電,只需用電纜充電的約一半時間。
日産汽車著眼於未來街頭隨處都有自動駕駛汽車行駛的情況,正將魚群在水中的游動方式作為研究的對象。設想利用車體的感測器等掌握與其他汽車或障礙物的距離,以在多輛汽車同時行駛時保持一定距離。這項研究有望在解決交通擁堵和防止追尾事故等方面發揮作用。
日産已經提出了力爭在2020年之前面向市場發售自動駕駛汽車的目標,相關研發正在加緊進行。
版權聲明:日本經濟新聞社版權所有,未經授權不得轉載或部分複製,違者必究。
- 日經中文網公眾平臺上線!
請掃描二維碼,馬上關注!






HotNews
金融市場
| 日經225指數 | 54253.68 | 435.64 | 02/06 | close |
| 日經亞洲300i | 2632.52 | -18.84 | 02/06 | close |
| 美元/日元 | 157.12 | 0.01 | 02/07 | 05:50 |
| 美元/人民元 | 6.9380 | 0.0009 | 02/06 | 11:20 |
| 道瓊斯指數 | 50115.67 | 1206.95 | 02/06 | close |
| 富時100 | 10369.750 | 60.530 | 02/06 | close |
| 上海綜合 | 4065.5834 | -10.3333 | 02/06 | close |
| 恒生指數 | 26559.95 | -325.29 | 02/06 | close |
| 紐約黃金 | 4951.2 | 89.8 | 02/06 | close |